ReductStore v1.19: Open Data Backbone for Robotics and ROS
ReductStore 1.19.0 is now available. This release extends the storage model for robotics and telemetry workloads and introduces new integration points for ROS and Zenoh.
To download the latest release, visit the Download Page.
What's new in 1.19.0?
The first major change in v1.19 is licensing. ReductStore Core is now open source under Apache 2.0, which makes the core database easier to evaluate, integrate, and extend in production systems.
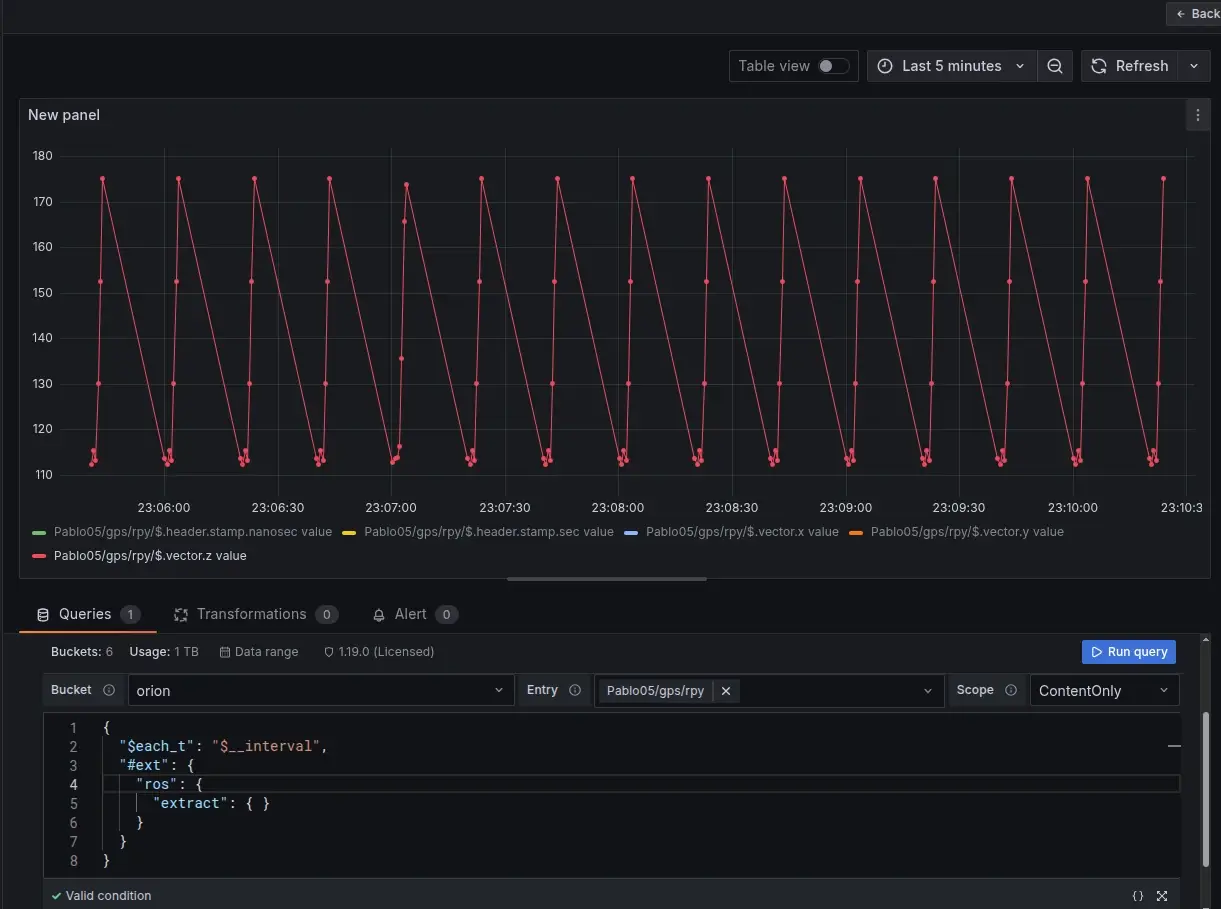
The second major change is the data model. ReductStore now supports hierarchical entry names, similar to ROS topics, and adds entry attachments for schemas and metadata. This makes it possible to represent structured robotics data without flattening topic hierarchies or moving context into external systems.
The release also introduces a native Zenoh API for direct ingestion and querying over Zenoh, and ReductBridge for ROS1 and ROS2 integration.