Air-Gapped Drone Data Operations with Delayed Sync and Auditability
· 8 min read


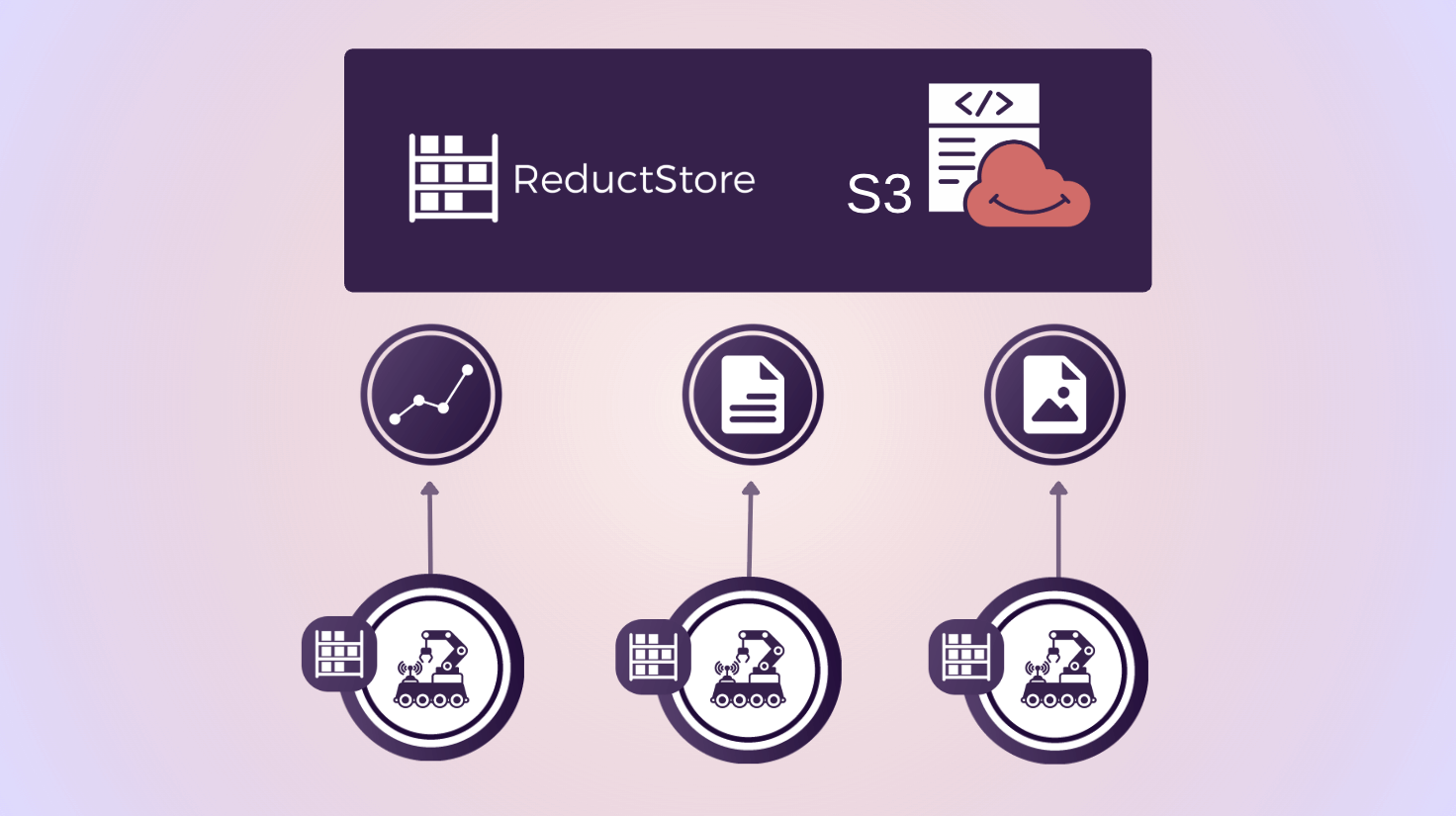
Drones in air-gapped environments produce a lot of data (camera images, telemetry, logs, model outputs). Storing this data reliably on each drone and syncing it to a ground station later can be hard. ReductStore makes this easier: it's a lightweight, time-series object store that works offline and replicate data when a connection is available.
This guide explains a simple setup where each drone stores data locally with labels, replicates records to a ground station based on what it detects, and keeps a clear audit trail of what was captured and replicated.